1. Тангенциальное и нормальное ускорение

При неравномерном криволинейном движении скорость может меняться по модулю и направлению , соответственно, есть две составляющие ускорения: тангенциальное и нормальное (центростремительное) ускорение (рис. \(2\)).

Рис. \(2\). Ускорение при криволинейном движении

Рис. \(3\). Тангенциальное и нормальное ускорение
Рис. 1. Траектория тела, движущегося криволинейно. © ЯКласс.
Рис. 2. Ускорение при криволинейном движении. © ЯКласс.
Рис. 3. Тангенциальное и нормальное ускорение. © ЯКласс.
11. Связь тангенциального и углового ускорения.
При вращении за время  угловая скорость получит приращение
угловая скорость получит приращение , тогда (8) примет вид:
, тогда (8) примет вид:


 (14)
(14)

Разделим обе части на , получим:

(15)
(16)

(17)
Вектор тангенциального ускорения совпадает по направлению с векторным произведением  . Векторное произведение всегда связано справилом правого винта: вращая головку винта по направлению вектора
. Векторное произведение всегда связано справилом правого винта: вращая головку винта по направлению вектора  , стоящего на первом месте в (13), к вектору
, стоящего на первом месте в (13), к вектору , стоящему на втором месте, определяем по поступательному движению винта направление третьего вектора
, стоящему на втором месте, определяем по поступательному движению винта направление третьего вектора .
.
12. Мгновенное угловое ускорение.
При получим мгновенное угловое ускорение:

, (18)
т.е. мгновенное угловое ускорение численно равно первой производной угловой скорости по времени или – второй производной углового перемещения по времени.
Приложение 1.












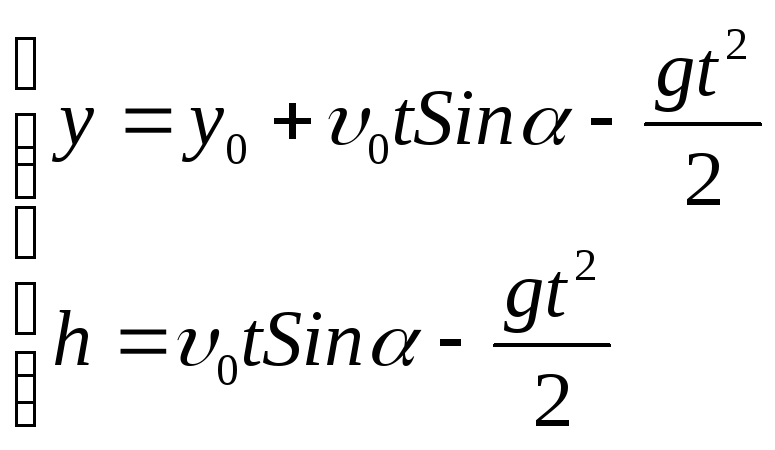
Движение тела, брошенного вертикально вниз

При




При


Движение тела, брошенного вертикально вверх



При
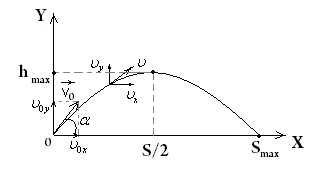
Движение тела, брошенного горизонтально

 ;
;
 ;
;

 ;
; 


Движение тела, брошенного под углом к горизонту







Движение тела по окружности
Тангенциальное и нормальное ускорение.
При движении по криволинейной траектории изменяется не только модуль скорости, но и ее направление, поэтому вектор ускорения представляют в виде двух составляющих: тангенциального ( ) и нормального (
) и нормального ( ).
).
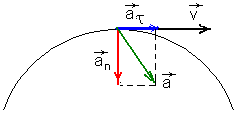
Тангенциальное (касательное) ускорение – составляющая вектора ускорения, направленная вдоль касательной к траектории в данной точке. (Тангенциальное ускорение характеризует изменение скорости по модулю;

Направление вектора совпадает с направлением линейной скорости или противоположно ему).

Нормальное ускорение– составляющая вектора ускорения, направленная вдоль нормали к траектории в данной точке. (Нормальное ускорение характеризует изменение скорости по направлению. Векторнаправлен по радиусу кривизны траектории).
Модуль полного ускорения при этом определяется соотношением:

.
Направление полного ускоренияопределяют правилом сложения векторов:
.








Основная литература.
1. Трофимова, Т. И. Курс физики: учеб. пособие для вузов / Т. И. Трофимова. – М. : Издательский центр «Академия», 2006. – 560 с.
Дополнительная литература.
1. Савельев, И. В. Курс общей физики / И. В. Савельев. – М. : Наука, 2005. Т.1-5.
2. Курс общей физики / С. Э. Фриш, А. В. Тиморева. – СПб., М., Краснодар : «Лань», 2006. Т.1-3.
3. Сивухин, Д. В. Общий курс физики / Д. В. Сивухин. — М. : Физматлит, 2005. Т.1-5.
Угловое ускорение
Система понятий кинематики включает в себя также такую величину как угловое ускорение тела. Дадим ей определение, рассмотрим основные аспекты с использованием примеров.
Основные понятия
Выведем формульно закон равнопеременного вращения. Пусть в начальный момент времени t 0 угол вращения равен ϕ = ϕ 0 ; угловая скорость — ω = ω 0 (т.е. ω 0 является начальной угловой скоростью).
Выражение ε = d ω d t = ω ˙ = φ ¨ дает нам возможность сделать запись: d ω = ε d t . Проинтегрируем левую часть крайней записи в пределах от ω 0 до ω , а правую – в пределах от 0 до t , тогда:
ω = ω 0 + ε t , d φ = ω 0 d t + ε t d t .
Проинтегрируем вторично и получим формулу, выражающую закон равнопеременного вращения:
Пример 2
Пусть задана некоторая материальная точка, совершающая движение по окружности с радиусом R . При этом выражение ϕ = α t 3 отражает зависимость угла поворота от времени. Необходимо найти полное ускорение заданной точки как функцию времени.
Решение
Запишем выражения для угловой скорости и углового ускорения заданной точки:
ω = d φ d t = 3 α t 2 ; ε = 6 α t .
Полное ускорение запишем как:
a = a r 2 + a n 2 = R ε 2 + ω 4 = R 36 a 2 t 2 + 81 a 4 t 8 = 3 a t R 4 + 9 a 2 t 6 .
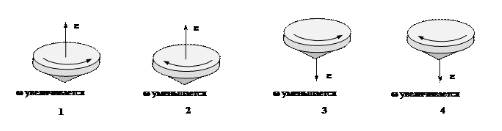
Виды движения по окружности

Угловое движение можно условно разделить на два вида:
- Когда изменяется только направление вектора линейной скорости, а его длина не изменяется.
- Или, когда изменяются обе характеристики вектора линейной скорости.
Во втором случае, для описания движения будем применять более сложные формулы кинематики. Так как появится еще один вид ускорения.
Центростремительное (нормальное) ускорение есть всегда, когда есть движение по окружности, при этом не важно, меняется ли скорость тела по модулю, или не меняется.
Движение по окружности с постоянной по модулю скоростью
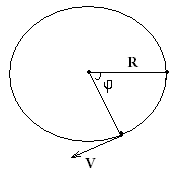
Пусть тело движется по окружности, но при этом длина вектора линейной скорости не меняется (рис. 1).
\[\left|\vec \right| = const\]
Рис. 1. Вектор центростремительного ускорения направлен по радиусу к центру окружности, он изменяет направление вектора скорости, но модуль вектора скорости остается неизменным
На рисунке 1 указаны: а) – вид сбоку, б) вид сверху, вектор угловой скорости направлен к нам перпендикулярно рисунку.
Скорость будет меняться только по направлению от точки к точке, потому, что на тело действует центростремительная сила \(\displaystyle \vec>>\) , тело обладает центростремительным \(\displaystyle \vec>>\) (нормальным) ускорением.
Кроме линейной, тело обладает угловой скоростью. Если линейная скорость не изменяется по модулю, то длина вектора угловой скорости не меняется.
На рисунке 1а изображен вектор угловой скорости \(\displaystyle \vec<\omega>\), на рисунке 1б вектор угловой скорости направлен к нам перпендикулярно плоскости рисунка. Направление, в котором тело движется по окружности, указано синей стрелкой.
Тангенциальное ускорение – когда модуль скорости меняется
Тело может увеличивать или уменьшать свою скорость, когда движется по окружности.
В таком случае, дополнительно к нормальному ускорению возникает тангенциальное \(\displaystyle \vec>\) ускорение.
Тангенциальное ускорение играет роль линейного ускорения при прямолинейном движении тела. Вектор \(\displaystyle \vec>\) направлен параллельно вектору \(\displaystyle \vec\) скорости.
Подобно движению по прямой, вектор ускорения – это первая производная скорости по времени, или вторая производная перемещения по времени.
Когда векторы скорости \(\vec\) и ускорения \(\vec>\) сонаправлены (рис. 2), линейная и угловая скорости возрастают.
Рис. 2. Когда тангенциальное ускорение сонаправлено с вектором линейной скорости, эта скорость возрастает
А когда ускорение \(\vec>\) направлено противоположно (рис. 3) вектору скорости \(\vec\), угловая и линейная скорости уменьшаются.
Рис. 3. Когда тангенциальное ускорение направлено противоположно вектору линейной скорости, эта скорость убывает
С линейной скоростью \(\vec\) связана угловая \(\vec<\omega>\) скорость.
Из рисунков 2, 3 следует: когда появляется тангенциальное ускорение, меняется и угловая скорость. Значит, тангенциальное ускорение \(\vec>\) появляется совместно с угловым \(\vec\) ускорением и между ними есть связь.
Связь между тангенциальным и угловым ускорением выглядит аналогично связи между линейной и угловой скоростью.
В векторном виде
В скалярном виде
\[ \large \boxed < a_= \beta \cdot R >\]
\(\displaystyle \vec \left( \frac>>\right)\) – угловое ускорение;
\(\displaystyle \vec< a_> \left( \frac>>\right)\) – тангенциальное ускорение;
\(R \left( \text\right)\) – радиус окружности.
Равноускоренное движение по окружности
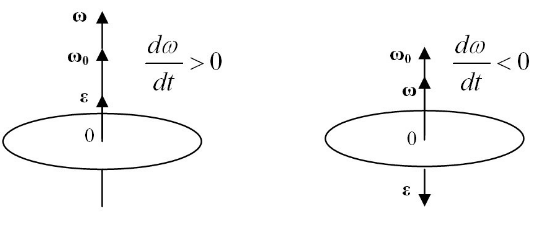
Угловая скорость увеличивается (рис. 2), когда угловое ускорение сонаправлено с вектором угловой скорости. Когда движение происходит с постоянным ускорением, его называют равноускоренным.
Для решения задач на равноускоренное движение по окружности, поступаем аналогично равноускоренному движению по прямой. Применяем систему из двух уравнений:
\[ \large \boxed < \begin\omega = \omega _ + \beta \cdot t \\ \displaystyle \varphi = \omega_ \cdot t + \beta \cdot \frac \end > \]
Первое уравнение системы – это связь между начальной \(\omega_ \) и конечной \(\omega \) скоростью. Второе уравнение – это уравнение движения.
Равнозамедленное движение по окружности
Когда векторы \(\vec\) и \(\vec<\omega>\) направлены в противоположные стороны, угловая скорость \(\vec<\omega>\) уменьшается (рис. 3).
Для решения задач кинематики, в которых угловая скорость уменьшается и, движение равнозамедленное, используем систему, состоящую из таких уравнений:
\[ \large \boxed < \begin\omega = \omega _ — \beta \cdot t \\ \displaystyle \varphi = \omega_ \cdot t — \beta \cdot \frac \end > \]
Общее ускорение при движении по окружности
Пусть точка движется по окружности и линейная \(\vec\) скорость ее изменяется по модулю. При этом, точка обладает двумя видами ускорения — нормальным и тангенциальным. Эти виды ускорения обозначают символом \(\vec\).
Примечание: Любое ускорение, обозначаемое символом «a», измеряется в метрах, деленных на секунду в квадрате.
Рис. 4. Складывая геометрически векторы нормального и тангенциального ускорения, получаем общее ускорение точки, движущейся по окружности
Направление вектора общего ускорения указано на рисунке 4а, а для равнозамедленного – на рисунке 4б.
Так как векторы \(\vec>\) и \(\vec>\) всегда перпендикулярны, длину вектора общего ускорения \(\vec\) можно найти из теоремы Пифагора: