обратная связь
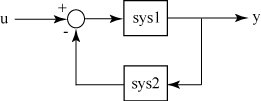
sys = feedback(sys1,sys2) возвращает объект модели sys для соединения отрицательной обратной связи объектов модели sys1 и sys2 .
Модель sys с обратной связью имеет u как входной вектор и y как выходной вектор. Модели sys1 и sys2 должны быть оба непрерывными или оба дискретные с идентичными шагами расчета. Правила приоритета использованы, чтобы определить получившийся тип модели (см. Правила, Которые Определяют Тип модели).
Чтобы применить позитивные отклики, используйте синтаксис
sys = feedback(sys1,sys2,+1)
По умолчанию feedback(sys1,sys2) принимает отрицательную обратную связь и эквивалентен feedback(sys1,sys2,-1) .
sys = feedback(sys1,sys2,feedin,feedout)
вычисляет модель sys с обратной связью для более общей обратной связи.
Векторный feedin содержит индексы во входной вектор sys1 и задает, какие входные параметры u вовлечены в обратную связь. Точно так же feedout задает, который выходные параметры y sys1 используются для обратной связи. Получившаяся модель sys имеет те же вводы и выводы как sys1 (с их сохраненным порядком). Как прежде, отрицательная обратная связь применяется по умолчанию, и необходимо использовать
sys = feedback(sys1,sys2,feedin,feedout,+1)
применять позитивные отклики.
Для более сложных структур обратной связи используйте append и connect .
Примеры
Пример 1
G ( s ) = 2 s 2 + 5 s + 1 s 2 + 2 s + 3
H ( s ) = 5 ( s + 2 ) s + 10
с помощью отрицательной обратной связи ввести
G = tf([2 5 1],[1 2 3],'inputname','torque'. 'outputname','velocity'); H = zpk(-2,-10,5) Cloop = feedback(G,H)
Эти команды приводят к следующему результату.
Zero/pole/gain from input "torque" to output "velocity": 0.18182 (s+10) (s+2.281) (s+0.2192) ----------------------------------- (s+3.419) (s^2 + 1.763s + 1.064)
Результатом является модель нулей и полюсов как ожидалось от правил приоритета. Обратите внимание на то, что Cloop наследовал имена ввода и вывода от G .
Пример 2
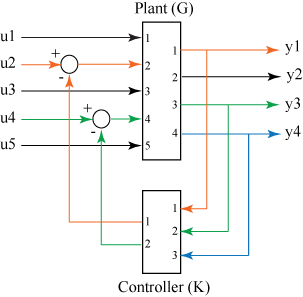
Считайте объект пространства состояний P с пятью входными параметрами и четырьмя выходными параметрами и контроллером обратной связи пространства состояний K с тремя входными параметрами и двумя выходными параметрами.
P = rss(3,4,5); K = rss(3,2,3);
Соединять выходные параметры 1, 3, и 4 из объекта к входным параметрам контроллера и контроллер выходные параметры к входным параметрам 4 и 2 из объекта, использования
feedin = [4 2]; feedout = [1 3 4]; Cloop = feedback(P,K,feedin,feedout)
Пример 3
Можно сформировать следующие циклы отрицательной обратной связи
Cloop = feedback(G,1) % left diagram Cloop = feedback(1,G) % right diagram
Ограничения
Связь обратной связи должна быть свободна от алгебраического цикла. Если D1 и D2 являются проходными матрицами sys1 и sys2 , это условие эквивалентно:
- I + D1D2, несингулярный при использовании отрицательной обратной связи
- I − D1D2, несингулярный при использовании позитивных откликов.
Смотрите также
Представлено до R2006a
Документация Control System Toolbox
- Примеры
- Функции и другая ссылка
- Информация о релизах
- PDF-документация
Поддержка
- MATLAB Answers
- Помощь в установке
- Отчеты об ошибках
- Требования к продукту
- Загрузка программного обеспечения
© 1994-2019 The MathWorks, Inc.
- Условия использования
- Патенты
- Торговые марки
- Список благодарностей
Для просмотра документации необходимо авторизоваться на сайте
Войти
Памятка переводчика
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста — например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
feedback
sys = feedback( sys1,sys2 ) возвращает объект модели sys для соединения отрицательной обратной связи объектов модели sys1,sys2 .
От фигуры, модели sys с обратной связью имеет u как входной вектор и y как выходной вектор. Обе модели, sys1 и sys2 , должно или быть непрерывным или дискретным с идентичными шагами расчета.
sys = feedback( sys1,sys2 , feedin , feedout ) вычисляет модель sys с обратной связью использование связей ввода и вывода, заданных с помощью feedin и feedout . Используйте этот синтаксис, когда это необходимо, чтобы соединить только подмножество доступного I/Os систем MIMO.
sys = feedback( sys1,sys2 ,’name’) вычисляет модель sys с обратной связью с соединениями обратной связи, заданными соответствующими именами ввода-вывода моделей MIMO sys1 и sys2 . Используйте ‘name’ отметьте только, когда все необходимые I/Os в наборе систем MIMO правильно назовут.
sys = feedback( ___ , sign ) возвращает объект модели sys для обратной связи с типом обратной связи, заданной sign . По умолчанию, feedback принимает отрицательную обратную связь и эквивалентен feedback(sys1,sys2,-1) . Чтобы вычислить систему с обратной связью с положительной обратной связью, используйте sign = +1 .
Примеры
Объект и контроллер с модульной обратной связью
pendulumModelAndController.mat содержит инвертированную модель G передаточной функции маятника SISO и его связанный ПИД-регулятор C .

Загрузите инвертированный маятник и модели контроллеров к рабочей области.
load('pendulumModelAndController','G','C'); size(G)
Transfer function with 1 outputs and 1 inputs.
size(C)
PID controller with 1 output and 1 input.
Используйте feedback создать цикл отрицательной обратной связи с G и C .
sys = feedback(G*C,1)
sys = 1.307e-06 s^3 + 3.136e-05 s^2 + 5.227e-06 s --------------------------------------------------------- 2.3e-06 s^4 + 1.725e-06 s^3 - 4.035e-05 s^2 - 5.018e-06 s Continuous-time transfer function.
sys результирующая передаточная функция непрерывного времени замкнутого цикла, полученная с помощью отрицательной обратной связи. feedback преобразует модель C ПИД-регулятора в передаточную функцию прежде, чем соединить его с моделью G передаточной функции непрерывного времени . Для получения дополнительной информации см. Правила, Которые Определяют Тип модели.
Объект с контроллером в пути к отрицательной обратной связи
В данном примере рассмотрите две передаточных функции, которые описывают объект G и контроллер C соответственно.

G ( s ) = 2 s 2 + 5 s + 1 s 2 + 2 s + 3 C ( s ) = 5 ( s + 2 ) s + 1 0
Создайте передаточные функции контроллера и объект.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Используйте feedback создать цикл отрицательной обратной связи с помощью G и C .
sys = feedback(G,C,-1)
sys = From input "torque" to output "velocity": 2 s^3 + 25 s^2 + 51 s + 10 --------------------------- 11 s^3 + 57 s^2 + 78 s + 40 Continuous-time transfer function.
sys результирующая передаточная функция замкнутого цикла, полученная с помощью отрицательной обратной связи с крутящим моментом как вход и скорость как выход.
Цикл положительной обратной связи с объектом и контроллером
В данном примере рассмотрите две передаточных функции, которые описывают объект G и контроллер C соответственно.

G ( s ) = 2 s 2 + 5 s + 1 s 2 + 2 s + 3 C ( s ) = 5 ( s + 2 ) s + 1 0
Создайте передаточные функции контроллера и объект.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Используйте feedback создать цикл положительной обратной связи с помощью G и C .
sys = feedback(G,C,+1)
sys = From input "torque" to output "velocity": -2 s^3 - 25 s^2 - 51 s - 10 --------------------------- 9 s^3 + 33 s^2 + 32 s - 20 Continuous-time transfer function.
sys результирующая передаточная функция замкнутого цикла, полученная с помощью положительной обратной связи с крутящим моментом как вход и скорость как выход.
Цикл отрицательной обратной связи с системами MIMO
На основе рисунка ниже рассмотрите соединение двух передаточных функций MIMO с двумя входными параметрами и двумя выходными параметрами в цикле отрицательной обратной связи.

В данном примере создайте две случайных непрерывных модели в пространстве состояний с помощью rss .
G = rss(4,2,2); C = rss(2,2,2); size(G)
State-space model with 2 outputs, 2 inputs, and 4 states.
size(C)
State-space model with 2 outputs, 2 inputs, and 2 states.
Используйте feedback соединять эти две модели в пространстве состояний в цикле отрицательной обратной связи согласно вышеупомянутой фигуре.
sys = feedback(G,C,-1); size(sys)
State-space model with 2 outputs, 2 inputs, and 6 states.
Получившаяся модель в пространстве состояний sys 2 входа, 2 выходных модели с 6 состояниями. Цикл отрицательной обратной связи завершается таким образом что,
- Первый выход G соединяется с первым входом C
- Второй выход G соединяется со вторым входом C
Обратная связь на основе имен ввода-вывода
mimoPlantAndController.mat содержит 2 входа, 2 выходных модели объекта управления передаточной функции G и 2 входа, 2 выходных моделей контроллеров передаточной функции C быть соединенным можно следующим образом:

Во-первых, загрузите объект и модели контроллеров к рабочей области.
load('mimoPlantAndController.mat','G','C'); size(G)
Transfer function with 2 outputs and 2 inputs.
size(C)
Transfer function with 2 outputs and 2 inputs.
По умолчанию, feedback соединил бы первый выход G к первому входу C и второй выход G к второму входу C . Для того, чтобы соединить объект и контроллер согласно фигуре, назовите соответствующий I/Os этих двух систем, чтобы гарантировать правильные связи.
G.InputName
ans = 2×1 cell
G.OutputName
ans = 2×1 cell
C.InputName
ans = 2×1 cell
C.OutputName
ans = 2×1 cell
Затем используйте ‘name’ отметьте с помощью feedback команда, чтобы установить связи согласно именам ввода-вывода.
sys = feedback(G,C,'name');
Получившаяся передаточная функция отрицательной обратной связи замкнутого цикла sys имеет соединения обратной связи в необходимом порядке.
Задайте связи ввода и вывода в обратной связи
Считайте объект пространства состояний G с пятью входными параметрами и четырьмя выходными параметрами и контроллером обратной связи пространства состояний K с тремя входными параметрами и двумя выходными параметрами. Выходные параметры 1, 3, и 4 из объекта G должен быть подключен контроллер K входные параметры и контроллеры выход к входным параметрам 2 и 4 из объекта.

В данном примере сгенерируйте рандомизированные модели в пространстве состояний непрерывного времени с помощью rss для обоих G и K .
G = rss(3,4,5); K = rss(3,2,3);
Задайте feedout и feedin векторы на основе вводов и выводов, которые будут соединены в обратной связи.
feedin = [2 4]; feedout = [1 3 4]; sys = feedback(G,K,feedin,feedout,-1); size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys результирующая модель в пространстве состояний замкнутого цикла, полученная путем соединения заданных вводов и выводов G и K .
Входные параметры
sys1,sys2 — Системы, чтобы соединиться в обратной связи
модели динамической системы
Системы, чтобы соединиться в обратной связи в виде моделей динамической системы. Динамические системы, которые можно использовать, включают:
- Непрерывное время или дискретное время числовые модели LTI такой как tf , zpk , pid , pidstd , или ss модели.
- Модели частотной характеристики такой как frd или genfrd .
- Обобщенные или неопределенные модели LTI такой как genss или uss Модели (Robust Control Toolbox) . (Используя неопределенные модели требует программного обеспечения Robust Control Toolbox™.) Получившаяся обратная связь принимает
- текущие значения настраиваемых компонентов для настраиваемых блоков системы управления.
- номинальные значения модели для неопределенных блоков системы управления.
Для получения дополнительной информации см. модели динамической системы.
Когда sys1 и sys2 два различных типа модели, feedback использует правила приоритета, чтобы определить получившуюся модель sys . Например, когда модель в пространстве состояний и передаточная функция соединяются в обратной связи, получившаяся система является моделью в пространстве состояний на основе правил приоритета. Для получения дополнительной информации см. Правила, Которые Определяют Тип модели.
feedin — Подмножество входных параметров, которые будут использоваться
вектор
Подмножество входных параметров, которые будут использоваться в виде вектора.
От фигуры, feedin содержит индексы входного вектора объекта MIMO P и задает, какое подмножество входных параметров u вовлечены в обратную связь. Получившаяся модель sys имеет те же входные параметры как G , с их сохраненными порядками.
feedout — Подмножество выходных параметров, которые будут использоваться
вектор
Подмножество выходных параметров, которые будут использоваться в виде вектора.
feedout задает который выходные параметры объекта MIMO G используются для обратной связи. Получившаяся модель sys имеет те же выходные параметры как G , с их сохраненными порядками.
sign — Тип обратной связи
-1 (значение по умолчанию) | +1
Тип обратной связи в виде -1 для отрицательной обратной связи или +1 для положительной обратной связи. feedback принимает отрицательную обратную связь по умолчанию.
Выходные аргументы
sys — Система с обратной связью
модель динамической системы
Система с обратной связью, возвращенная как SISO или модель динамической системы MIMO. sys может быть одно из следующего в зависимости от правил приоритета:
- Непрерывное время или дискретное время числовые модели LTI, такой как tf , zpk , ss , pid , или pidstd модели.
- Обобщенные или неопределенные модели LTI такой как genss или uss Модели (Robust Control Toolbox) . (Используя неопределенные модели требует программного обеспечения Robust Control Toolbox.)
Когда sys1 и sys2 два различных типа модели, feedback использует правила приоритета, чтобы определить получившуюся модель sys . Например, когда модель в пространстве состояний и передаточная функция соединяются в обратной связи, получившаяся система является моделью в пространстве состояний на основе правил приоритета, обрисованных в общих чертах в Правилах, Которые Определяют Тип модели.
Ограничения
- Соединение обратной связи должно быть свободно от алгебраических циклов. Например, если D1 и D2 являются проходными матрицами sys1 и sys2 , это условие эквивалентно:
- I + D1D2, несингулярный при использовании отрицательной обратной связи
- I − D1D2, несингулярный при использовании положительной обратной связи
Советы
- Для сложных структур обратной связи использовать append и connect .
Смотрите также
Темы
- Правила, которые определяют тип модели
- Обратная связь MIMO
- Использование FEEDBACK для замыкания контура
Представлено до R2006a
Открытый пример
У вас есть модифицированная версия этого примера. Вы хотите открыть этот пример со своими редактированиями?
Документация Control System Toolbox
- Примеры
- Функции и другая ссылка
- Информация о релизах
- PDF-документация
Поддержка
- MATLAB Answers
- Помощь в установке
- Отчеты об ошибках
- Требования к продукту
- Загрузка программного обеспечения
© 1994-2021 The MathWorks, Inc.
- Условия использования
- Патенты
- Торговые марки
- Список благодарностей
Для просмотра документации необходимо авторизоваться на сайте
Войти
Памятка переводчика
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста — например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
5. Передаточные функции и уравнения динамики замкнутых систем автоматического регулирования (САР)
Продолжаем публикацию лекций по курсу «Управление в Технических Системах» автор — Олег Степанович Козлов на кафедре Э7 МГТУ им. Н.Э. Баумана.
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется. В предыдущих сериях:
Будет как всегда позновательной увлекательно и жестко
5.1. Главная передаточная функция. Передаточные функции по возмущающему воздействию и для ошибки (рассогласования)
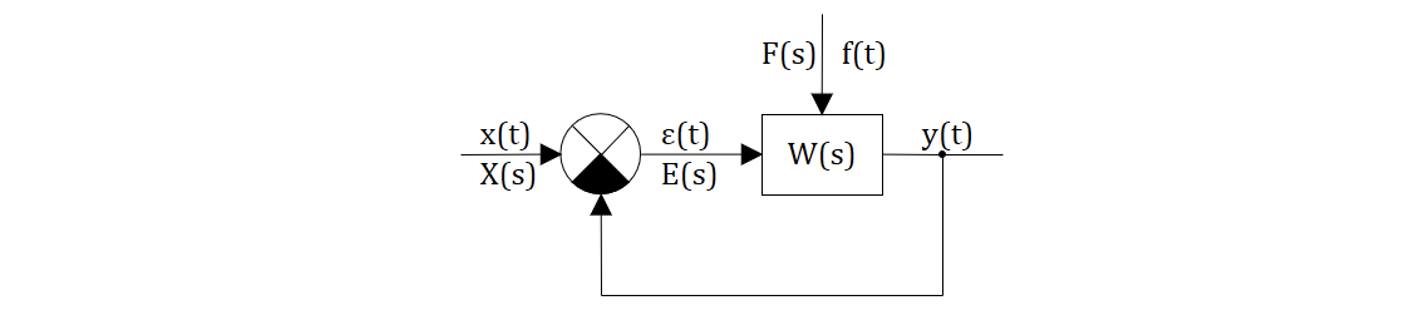
Используя структурные преобразования (см. раздел 4), структурную схему практически любой линейной или линеаризованной САР (САУ) можно привести к виду:
Где функции по времени:
– регулируемая величина (выходное воздействие);
Или в изображениях:
Определение: Если единичная обратная связь охватывает все элементы (звенья) САР – она называется главной.
Определение: Если главная обратная связь отсутствует — САР считается разомкнутой.
Передаточная функция может быть любой сложности (т.е. содержать местные обратные связи, параллельные и последовательные цепи и т.д.).
Возмущающих воздействий может быть несколько и приложены они могут быть в любом месте структурной схемы.
Передаточную функцию которую в Теории Управления называют передаточной функцией разомкнутой САР, будем представлять в следующем виде (для единообразия):
где – общий коэффициент усиления; – полиномы по степеням переменной , причем свободные члены в них равны 1 (единице).
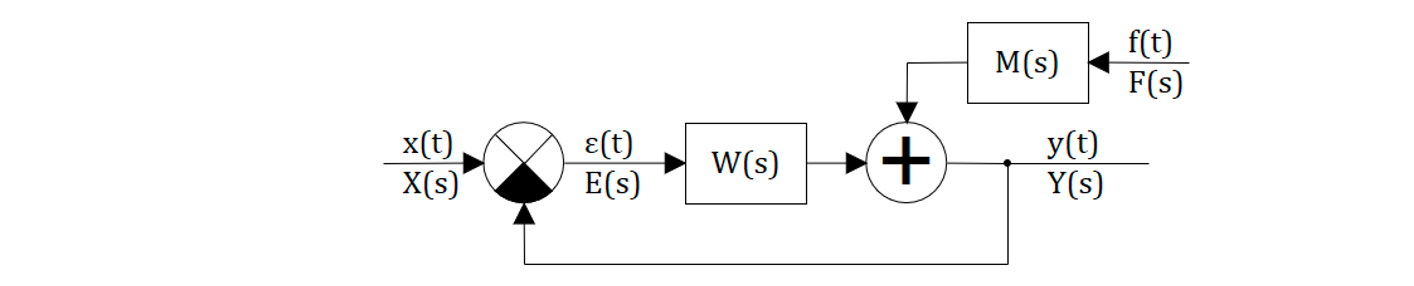
Учитывая, что САР линейна или линеаризована, разделим на структурной схеме каналы прохождения управляющего и возмущающего воздействий. Выделим в отдельное звено (может быть и очень сложное) ту часть системы, через которую проходит возмущающее воздействие обозначим ее через Структурная схема САР принимает вид:

В Теории Управления используют 3 основных передаточных функций замкнутой САР:
- главная передаточная функция ;
- передаточная функция по возмущающему воздействию ;
- передаточная функция для ошибки (рассогласования)
Рассмотрим более подробно вышеупомянутые передаточные функции.
Главная передаточная функция
Главная передаточная функция -передаточная функция по управляющему воздействию математическое определение этой передаточной функции:
выведем формулу при условии если возмущеющие воздействие равно . «Обойдем» структурную схемв по контуру:
Примечание. Формула (5.3) совпадает с формулой для передаточной функции цепи с местной единичной обратной связью (см. раздел 4 – «Структурные преобразования»).
Подставляя вместо ее выражение через полиномы и
Анализ выражения (5.4) показывает, что свойства главной передаточной функции замкнутой САР однозначно определяются свойствами разомкнутой САР, т.е. через полиномы и .
Передаточная функция замкнутой САР по внешнему возмущающему воздействию
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействи , а возмущеющие воздействие отличное от нуля . В этом случае (см. рисунок 5.1.2) получается:
Перрейдем к изображением и «обойдем» схему (см. рис. 5.1.2) по контуру
Подставляя вместо ее выражение через полиномы и получаем:
где: — вид данного полинома зависит от места приложения возмущающего воздействия;
Формулы 5.4 и 5.6 имеют общий занаменатель
Передаточная функция замкнутой САР для ошибки (рассогласования)
Дадим математическое определение рассматриваемой передаточной функции если управляющие воздействиt отлично от 0 , а возмущеющие воздействие равно 0 . В этом случае для передаточной функции получается (см. рис. 5.1.2):
Сделаем вывод соответствующих формул, выполнив «обход» по контуру схемы (см. рис. 5.1.2)
Учитывая формулу для главной передаточной функции можно записать выражения для передаточной функции рассоглаосвания:
Подставляя вместо ее выражение через полиномы и получаем:
Опять замечаем, что знаменатель передаточной функции равен полиному следовательно, характерным признаком передаточных функций замкнутой САР является общность знаменателей ! ! !
В Теории Управления выражение имеет «собственное» название: характеристический полином замкнутой САР.
5.2 Уравнения динамики замкнутой САР
Как указывалось в подразделе 5.1, любую замкнутую САР можно привести к виду представленному на рисунке 5.2.1:
Выведены соотношения для 3-х основных передаточных функций замкнутой САР позволяют записать выражения для регулируемой величины в изображениях:
Подставляя значения и через полиномы и разомкнутой САР получаем:
подставим значения для характеристического полинома получим выражение для динамического уравнения замкнутой САР в изображениях:
Переходя к оригиналам получаем символическую форму записи обыкновенного дифференциального уравнения замкнутой САР:
Решение диференциального уравнения состоит из двух частей:
где: — собственная часть, решение однородного дифференциального уравнения ;
— вынужденная часть решения (частное решение), определяемая правой частью уравнения ( 5.2.3 ).
Решения однородного уравнения замкнутой САР:
записываем соответствующее характеристическое уравнение:
находим корни степенного уравнения если все корни уравнения разные:
Обычно находят по виду правой части уравнения (5.2.3) или, используя другие методы (например, метод вариаций постоянных).
Необходимо отметить, что порядок дифференциального уравнения (5.2.3) равен «n», т.е. такой же, как и у разомкнутой САР
если нет возмущающего воздействия, т.к. порядок дифференциального оператора L(p) обычно значительно выше, чем N(p).
По аналогии с выводом уравнения (5.2.3) можно получить уравнение динамики для рассогласования :
подставляя значения и (см. 5.6 и 5.9) получаем:
Уравнение (5.2.5)- уравнение динамики замкнутой САР в ихображениях для рассогласования (ошибки) при наличии управляющего и возмущающего воздействий.
Особенностью данного уравнения (5.2.5) является то, что левая часть его практически совпадает с левой частью (5.2.2), в то время, как порядок правой части заметно выше , т.к. порядок многочленов D (s) и L (s) — одинаков, а порядок N(s) меньше L(s).
Это означает, что внешние воздействия и влияют на более сильным образом.
Дифференциальное уравнение замкнутой САР для ошибки:
Способы решения уравнения ( 5.2.6 ) такие же, как и для уравнения ( 5.2.3 ) .
5.3. Частотные характеристики замкнутой САР.
Наибольший интерес при анализе замкнутых САР имеет АФЧХ замкнутой САР по управляющему воздействию:
где передаточная функция:
Учитывая, что — комплексное число, по аналогии имеем:
Где — вещественная часть функции, — мнимая часть функиции.
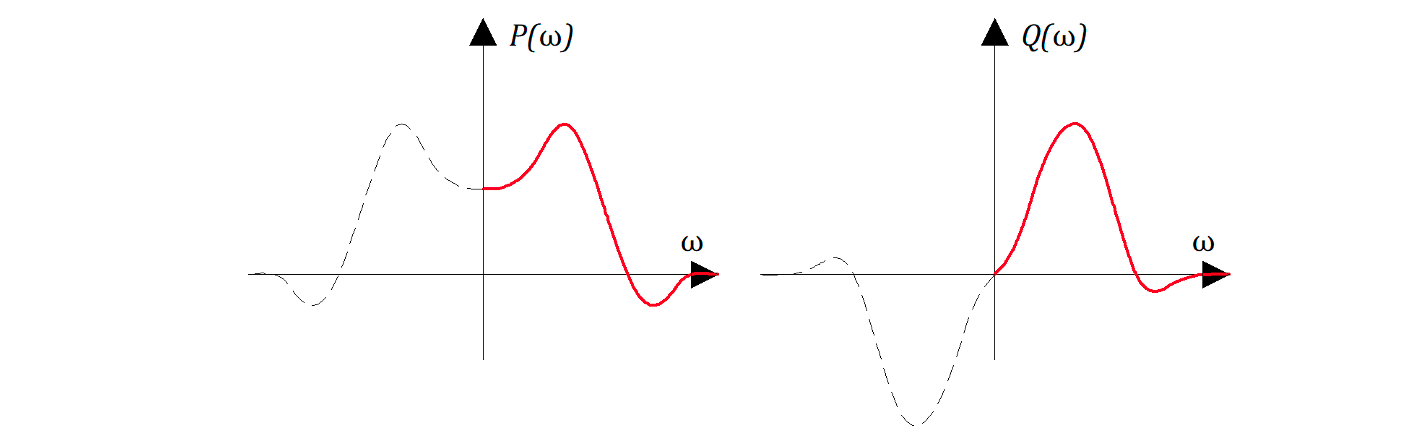
На этих рисунках представлен «примерный» вид зависимостей P (w)и Q(w) для «какой-то» замкнутой САР причем P(w) — четная функция, т.е. P(w) = P(-w); Q(w) — нечетная функция, т.е. Q(w) = — Q(-w).
Если известны частотные свойства разомкнутой САР, то можно определить частотные свойства замкнутой САР. Воспользуемся показательной формой для АФЧХ
Где — амплитуда (модуль), — сдвиг фазы (фаза). Подставляя это в (5.3.1), имеем получаем:
Приравнивая чисто вещественные и чисто мнимые части, имеем
Для нахождения амплитуды и сдвига фазы замкнутой передаточной функции как функции от амплитуды и сдвига фазы разомкнутой системы. Разделив (2) на (1) получим:
Сдвиг фазы замкнутой системы через характеристики разомкнутой системы:
Для получения амплитуды замкнутоей системы возведем оба уравнения системы (5.3.5) в квадрат:
складываем эти два уравнения:
Аналогичным образом можно выразить, например, P(w) и Q(w) — характеристики замкнутой САР через u(w) и u(w) — характеристики разомкнутой САР.
Пример
В качестве примера на рисунке 5.4.1 приведена модель помещения, в котором с помощью интегрирующего звена обеспечивается подвод тепла для поддержания температуры. Температура задается в виде ступенчатой функции. В качестве внешнего воздействия используется внешняя температура.
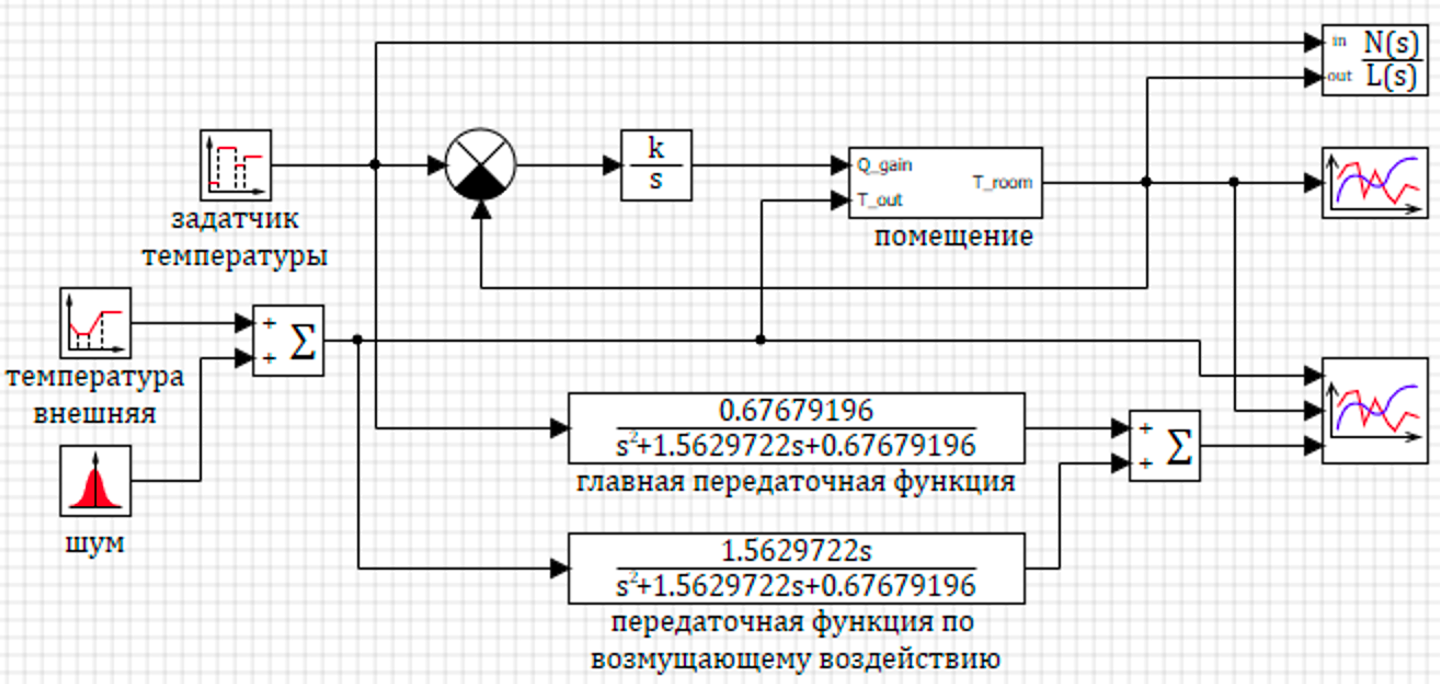
Передаточные функции построены средтвами автоматического анализа. Видно, что знаменатель главной передаточной функции и знаменатель передаточной функции по возмущающиму воздействию одинаковы.
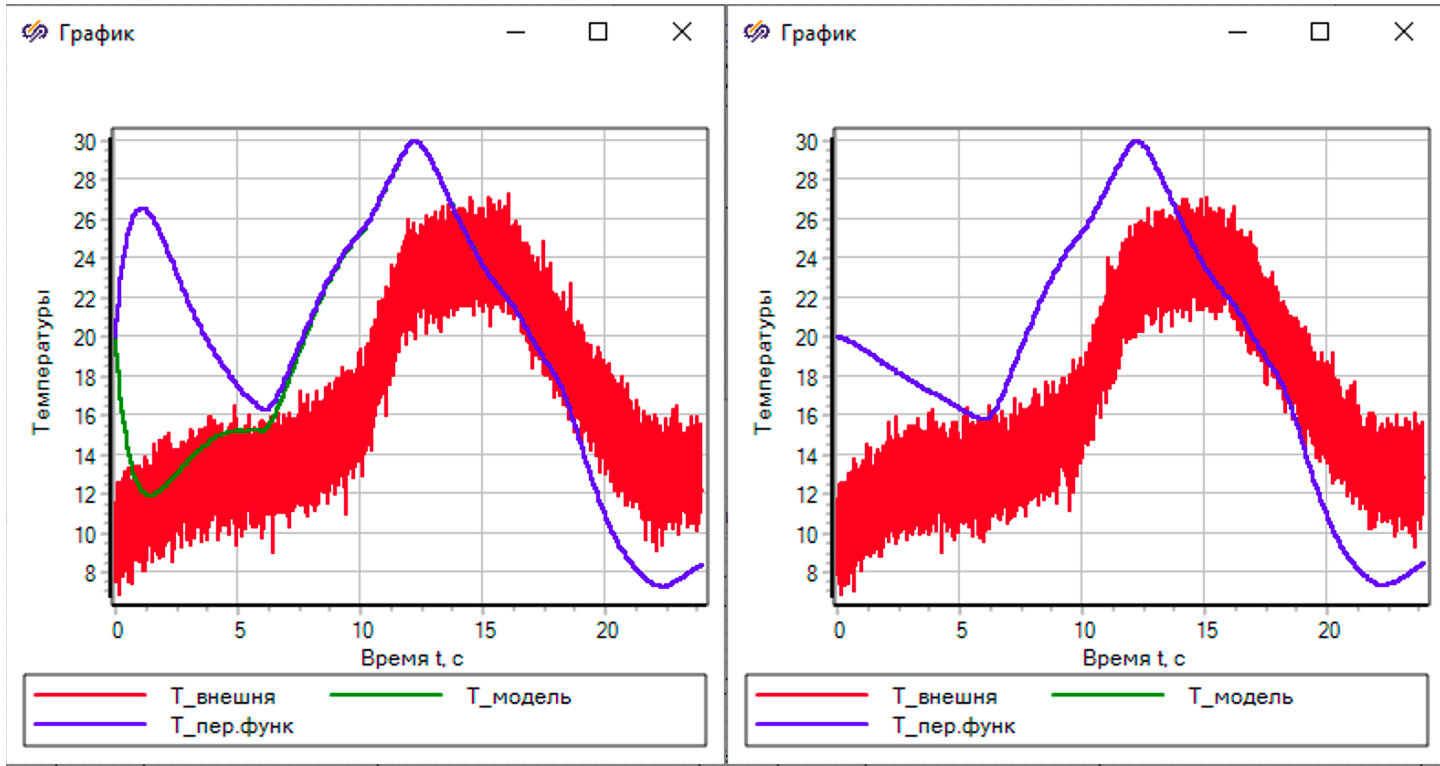
График справа показывает расхождение результаты модели (зеленая линия) и передаточных функций (синит линя) в начале расчета, но потом функции сходятся. Расхождение объясняются разными начальными условиями по производным. Слева тот же самый график, но в это случае начальное состояние определено с помощю загрузки стационарного состояния, полученного предварительным моделированием. В этом случае совпадение модели и передаточных функций полное.
Ссылку на модель примера можено взять здесь.
Matlab
Устройте конкурс между агентствами и узнайте реальные цены и сроки выполнения вашего проекта. Создание заказа занимает 5 минут.
Об инструменте
Что такое Matlab
Matlab – язык программирования, который входит в одноименный набор программ, предназначенных для научных вычислений и машинного обучения. Пакет программ Matlab – разработка компании MathWorks. Matlab и его утилиты – платные продукты с лицензиями разной стоимости для домашнего использования, использования в учебных заведениях, а также на коммерческих предприятиях.
Язык Matlab относится к высокоуровневым, интерпретируемым языкам со слабой динамической типизацией. Язык рассчитан на математические вычисления: Matlab поддерживает сотни видов математических функций, матричные структуры данных, векторы, многочлены, интерполяцию и дифференциальные уравнения.
Возможности, которые обеспечивает программная среда Matlab:
- визуализация графиков с возможностью построения 3D-графиков, анимированных видеороликов, визуальной аналитики данных;
- возможность компиляции кода в отдельные приложения при помощи компилятора Matlab Compiler и их запуск в среде выполнения кода Matlab Compiler Runtime;
- поддержка операционных систем Windows, macOS и Linux для разработки и выполнения кода на Matlab;
- поддержка разработки графических интерфейсов для компилируемых программ;
- поддержка инструментов Microsoft: технологического стандарта COM, платформы .NET и динамического обмена данными в Windows;
- поддержка интеграции кода на языках C, C++, а также подпрограмм Fortran через MEX-файлы;
- вызов методов веб-сервисов с поддержкой протокола SOAP, а также языка описания веб-сервисов WSDL.
Функционал программной среды Matlab дополняется платными расширениями для различных сфер научных и коммерческих вычислений. К примеру, есть официальные расширения для финансового анализа, работы с базами данных и разработке нейросетей. Также Matlab поддерживает интеграцию с Simulink – продуктом MathWorks для моделирования многодоменных динамических систем.
Где применяют Matlab
По большей части, Matlab используется в научных вычислениях, инженерных разработках, а также машинном обучении. Пакет программ Matlab поддерживает большое количество вспомогательных инструментов для разных сфер, в которых требуются сложные вычисления, а также моделирование.
Преимущества разработки на Matlab
- хорошо оптимизированная программная среда с небольшой вероятностью багов;
- большое количество официальных расширений для применения разработки на Matlab в различных сферах;
- поддержка интеграции кода на языках C, C++, Fortran;
- возможность трансляции кода на Matlab в C, C++ благодаря Matlab Coder;
- обновления и дополнения программной среды 2 раза в год;
- легкий в освоении синтаксис, рассчитанный на применение учеными и прочими людьми с минимальным опытом разработки.
Недостатки разработки на Matlab
- продукт платный, дополнительные расширения приобретаются отдельно за доплату, минимальная цена за лицензированный Matlab для домашнего использования – 100 долларов;
- медленная скорость выполнения программ на языке Matlab;
- сильная зависимость программ на Matlab и самого языка программирования от его экосистемы;
- есть бесплатный аналог – Julia, правда, с худшей оптимизацией и совместимостью расширений;
- малая популярность в русскоязычном сегменте.
Примеры готовых работ на Matlab
Примеры использования Matlab и сценарии применения программной среды можно изучить на официальном сайте: mathworks.com/help/examples.html.